手柄使用
控制模式
手柄控制固定在机器狗上的机械臂,有三种控制模式。
1.关节空间控制。当处于此模式时,手柄可控制机械臂单个关节转动。
2.笛卡尔空间控制。当处于此模式时,机械臂作为一个整体,手柄控制机械臂在工具坐标系下沿XYZ轴方向移动以及绕XYZ轴转动。
3.固定轨迹运动。机械臂内置演示用的固定动作。
手柄键位介绍
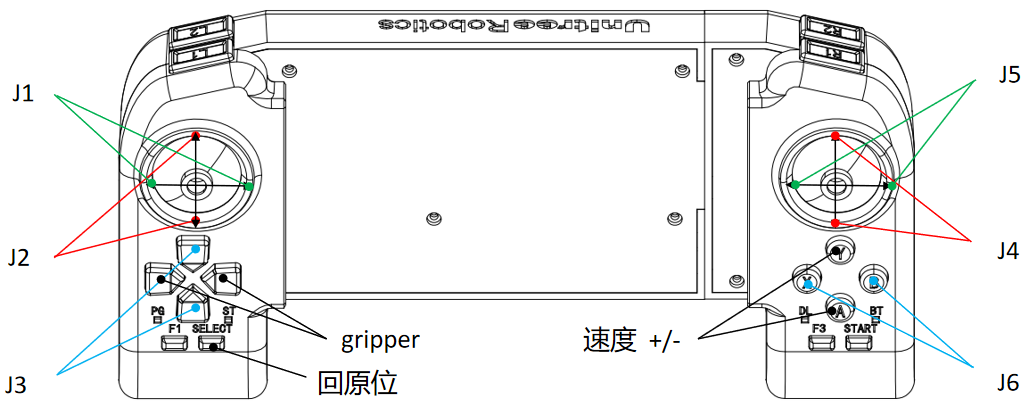
关节空间控制
- B1
当机器狗停止时,同时按住L1+L2键,切换到手柄控制机械臂,机器狗不再运动。此时按下R2键则进入关节空间控制模式,用手柄可控制单个关节转动,对应键位如下图所示。运动结束后,如果想让机械臂保持当前姿态不动,可同时按下L2+R2,机械臂不再接收手柄的控制信息,此时按下L1+L2,可使机械臂保持当前姿态控制机器狗运动。机器狗停止后,同时按住L1+L2键,切换到手柄控制机械臂,按下R2可继续控制机械臂动作,运动结束后,按下SELECT键可使机械臂回到原位。
- Aliengo
运动模式启动后,L2+A锁定机器狗,此时按下R2键则进入关节空间控制模式,用手柄可控制单个关节转动,对应键位如下图所示。运动结束后,按下SELECT键可使机械臂回到原位。手柄控制可参考B1。
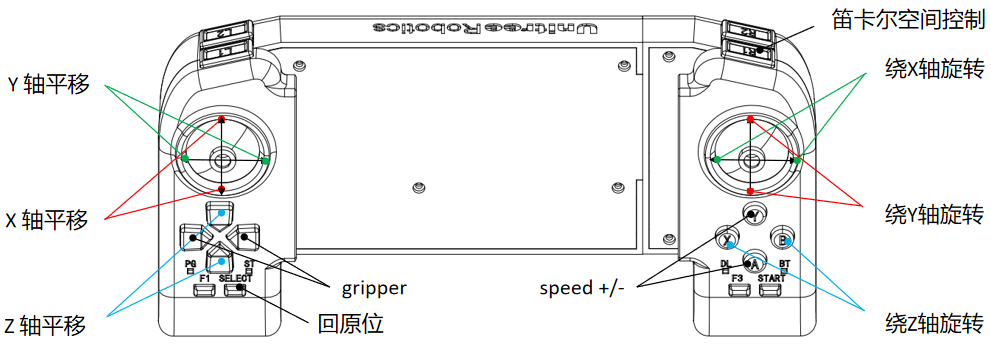
笛卡尔空间控制
- B1
当机器狗停止时,同时按住L1+L2键,切换到要控制控制机械臂,机器狗不再运动。此时按下R1键则进入笛卡尔空间控制模式,或者当机械臂处于关节空间控制模式下,按下R1键位也可进入笛卡尔空间控制模式,对应键位如下图所示。运动结束后,如果想让机械臂保持当前姿态不动,可同时按下L2+R2,机械臂不再接收手柄的控制信息,此时按下L1+L2,可使机械臂保持当前姿态控制机器狗运动。机器狗停止后,同时按住L1+L2键,切换到手柄控制机械臂,按下R2或R1可继续控制机械臂动作,运动结束后,按下SELECT键可使机械臂回到原位。
- Aliengo
运动模式启动后,L2+A锁定机器狗,此时按下R1键则进入笛卡尔空间控制模式,或者当机械臂处于关节空间控制模式下,按下R1键位也可进入笛卡尔空间控制模式,对应键位如下图所示。运动结束后,按下SELECT键可使机械臂回到原位。手柄控制可参考B1。
固定轨迹运动
- B1
当机器狗停止时,同时按住L1+L2键,切换到要控制控制机械臂,机器狗不再运动。按下R2键后进入关节空间控制,此时同时按下R2+A键机械臂会进入预设固定轨迹运动。若让机械臂回到原位,则按下SELECT键即可。
- Aliengo
运动模式启动后,L2+A锁定机器狗,按下R2键后进入关节空间控制,此时同时按下R2+X键机械臂会进入预设固定轨迹运动。若让机械臂回到原位,则按下SELECT键即可。
注意事项
- B1
由于机器狗和机械臂用同一个手柄进行控制,存在部分键位共用,因此,控制机器狗移动时,要同时按下R1+R2将机械臂切入阻尼状态或者同时按下L2+R2机械臂姿态固定,手柄可控制机器狗运动。判断机械臂是否在阻尼状态,可用手拖动机械臂,若能拖动则表明已切入阻尼。控制机械臂运动时,则需要机器狗处于停止状态。
- Aliengo
由于机器狗和机械臂用同一个手柄进行控制,存在部分键位共用,因此,控制机器狗移动时,要同时按下R1+R2将机械臂切入阻尼状态或者同时按下L2+R2机械臂姿态固定。判断机械臂是否在阻尼状态,可用手拖动机械臂,若能拖动则表明已切入阻尼。控制机械臂运动时,则需要机器狗处于停止状态。
更新日志
- 2023.10.10
- 避免按键冲突,将B1固定轨迹运动用R2+A键替代R2+X。
- 2023.1.5
- 键位映射优化,使用更直观。
- 新增功能,关节/笛卡尔空间控制速度可调节。
- 机械臂切入阻尼状态的键位,用R1+R2键替代L1+L2键。
- 新增功能,可使机械臂保持一定姿态并控制机器狗运动。
- 2022.10.11
- 机械臂回原位用SELECT键替代R2键。
- SELECT键不再控制机械臂做固定轨迹运动,用R2+X组合键位替代。
- 机械臂切入阻尼状态的键位,用L1+L2键替代R1+R2键。
- 2022.9.23
- 增加AL+机械臂手柄说明(临时),适用于2022年9月21号后发货的版本。
- 2022.8.29
- B1+机械臂手柄说明文档初稿。