开机前准备
一、零位摆放
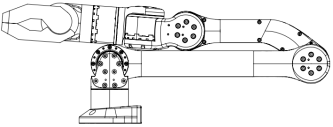
机械臂重新上电前一定要确保运动程序关闭,否则会有危险发生的可能。并让机械臂处于零位, 机械臂零位姿态如下图,J1、J6关节缝隙两侧的线完全对应,其他关节摆放到位即可。
1.需先将机械臂端电源线插入机械臂XT60口并固定后再将适配器端插入电源。严禁将适配器插入电源后再将电源线插入机械臂。2.需要特别注意的是,机械臂电机编码器为电机端单圈绝对值编码器,输出端没有编码器,每次使用前要将机械臂摆到指定位置(零位)。当然,每次使用完成通过程序控制机械臂回到零位,下一次使用前并不需要手动摆放。
成功上电时,自检通过机械臂绿灯会常亮,蓝灯闪烁。
需注意,每次使用前将机械臂各关节转到零位,这是为了让控制算法中的理论零位与实际机械零位重合。另外,机械臂末端电机的黑白电源线是有DC24V电的,如果不需要,请务必把黑白电源线用绝缘胶带缠绕固定,防止短路等发生危险。
二、网络配置
机械臂的默认IP为192.168.123.110,用户需要在同一网段才可与机械臂正常通信。
更改PC网段
完成以下设置后通过ping 192.168.123.110指令检测与机械臂连接是否正常。
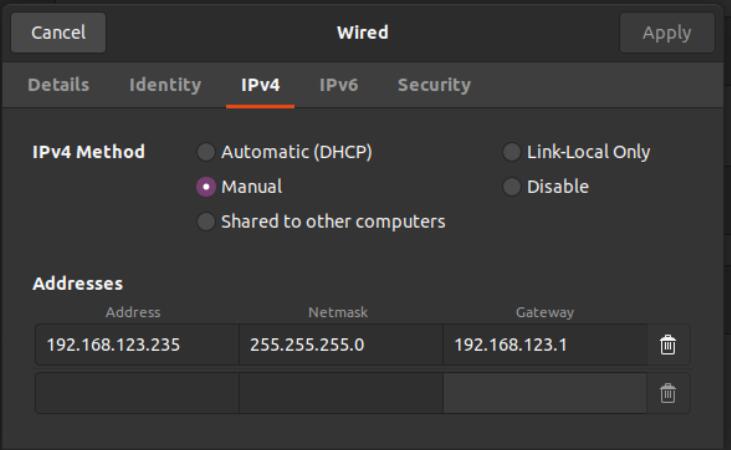
1. 方法一:图形界面操作
直接在系统网络设置的如下界面更改: Settings -> Network -> PCI/USB Ethernet (点击需要使用的网口后面的齿轮图标)
2. 方法二:命令行操作
以更改为192.168.123.162示例,在终端中运行ifconfig,您将找到您的端口名称(可通过插拔网线,查看增加/减少的端口,来查找对应的端口名称)。例如,enp000ec626053d.
以下命令中的enpxxx不可直接输入, 均需要替换成自己电脑中通过ifconfig所显示出来的具体名称。
sudo ifconfig enpxxx down # enpxxx is your PC port
sudo ifconfig enpxxx 192.168.123.162/24
sudo ifconfig enpxxx up
以上方式为临时更改IP使用,您也可以将永久更改PC的IP,操作如下
sudo vim /etc/network/interfaces
添加一下文本至上述打开的interfaces文件中
auto enpxxx
iface enpxxx inet static
address 192.168.123.162
netmask 255.255.255.0
默认IP更改
如需更改机械臂默认IP,可以通过网线连接机械臂辅助网口,并在终端运行z1_controller/unitreeArmTools.py程序,根据提示输入信息即可。
三、奇异
机械臂处于奇异位置,自由度将发生退化,会造成某些关节的角速度无限大,机械臂有失控风险。
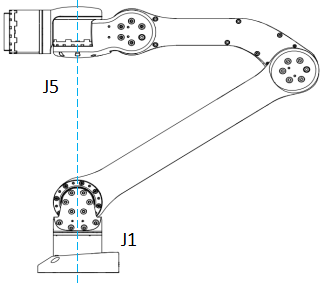
z1机械臂具有肩关节奇异:第五个关节轴线与第一个关节轴线同轴,如下图。
对于逆运动学问题,在奇异区域外,采取解析解方式;在奇异区域内,采用QP求近似解。
建议机械臂上电后运行至forward点位,避开该区域。